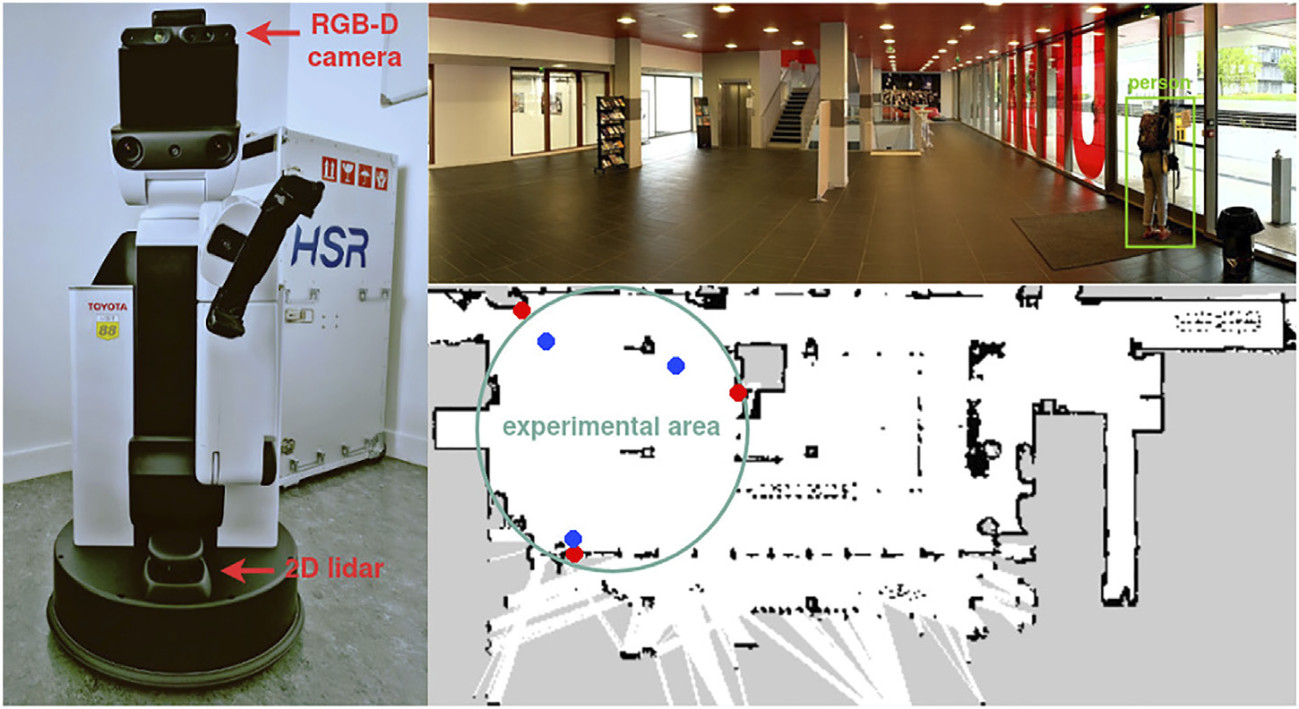
The Toyota Human Support Robot (HSR)
The Human Support Robot (HSR) is a compact mobile cobot (collaborative robot) platform from Toyota that can move around and fetch objects using a multi-degree-of-freedom arm while avoiding obstacles. Operable by voice command or by tablet PC, HSR has a highly maneuverable, compact, and lightweight cylindrical body with a folding arm that enables it to pick up objects off the floor, suction up thin objects, retrieve objects from high locations, open curtains, and perform other household tasks. The intention is that HSR will be able to assist those who are unable to move on their own, with everyday tasks.